We take a hands-on approach to
We take a hands-on approach to
drone engineering.
We are Badgerfly.
We are Badgerfly.
We are Badgerfly.
We are a competition robotics team focused on building eVTOLs UAV's. For the 2025-2026 season we will be designing and building a drone that can effectively fight wildfires.
We are a competition robotics team focused on building eVTOLs UAV's. For the 2025-2026 season we will be designing and building a drone that can effectively fight wildfires.
We are a competition robotics team focused on building eVTOLs UAV's. For the 2025-2026 season we will be designing and building a drone that can effectively fight wildfires.
Competitions
Competitions
Competitions

Design-Build-Vertical Competition
Design-Build-Vertical Competition
Design-Build-Vertical Competition
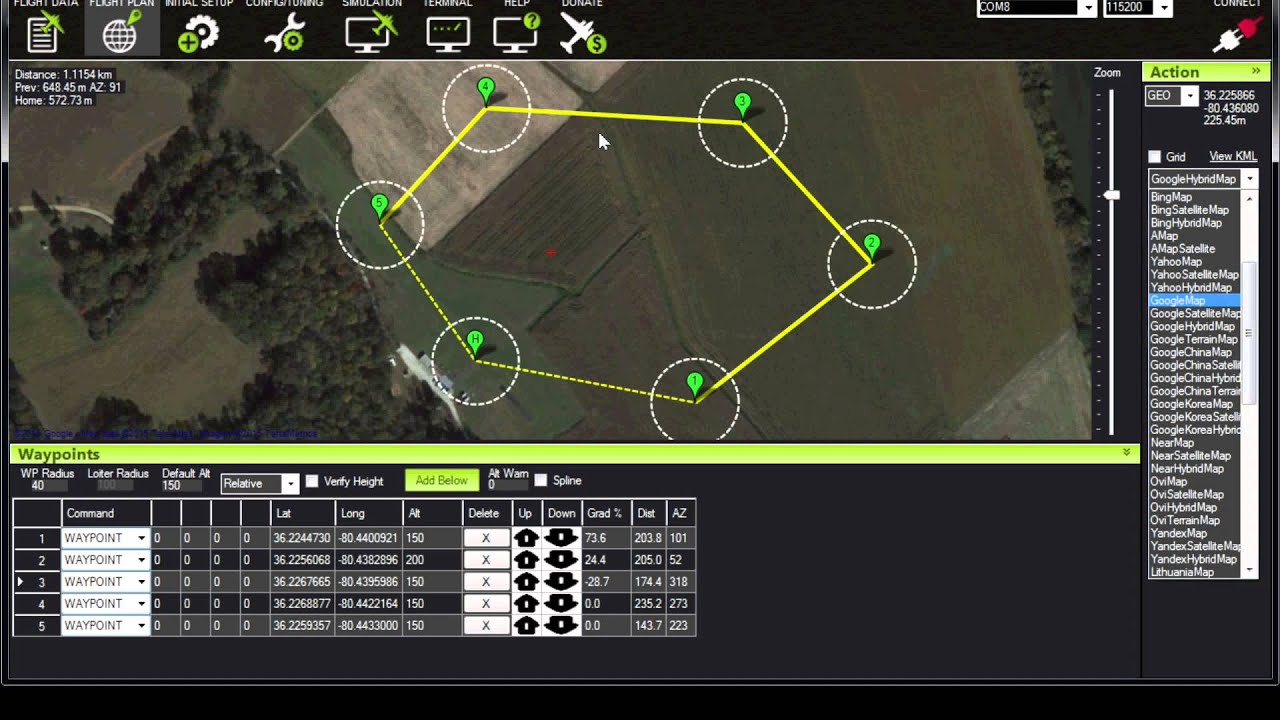
Design an electric vertical takeoff and landing (eVTOL) drone for wildfire response. The aircraft must complete a standardized mission course with a focus on speed, precision, and payload handling.
Teams
Teams
Teams
© 2024 Badgerfly
Mechanical Engineering, Room B1190
1513 University Ave
Madison, WI, 53706
© 2024 Badgerfly
Mechanical Engineering, Room B1190
1513 University Ave
Madison, WI, 53706
© 2024 Badgerfly
Mechanical Engineering, Room B1190
1513 University Ave
Madison, WI, 53706